|
|
|
Overview:
|
|
Mailing list:
|
|
Design:
|
|
SourceForge:
|
![[ Simulator of the helicopter ]](images/sim.06.png)
Simulating the Helicopter
In order to better develope and debug the flight control system, we've extended Aaron Kahn's aerodynamical simulator that he used for his X-Cell 60 project. The original source code and expanded version were written for Windows + OpenGL; we've converted it to work with Linux and our IMU / AHRS and control board. Our source code is available as Free Software. A packaged tar file is available for download (get Release 2.2).
The graphics aren't photorealistic, but the model includes the aerodynamic effects of the horizontal and vertical tail surfaces, engine torque, swashplate non-linearity, inertia, transmission power loss, translational lift and many, many other factors. These constants are specified in the init_model() routine in model.cpp.
 As a compile time option, you can select an
HH60
or
HH65
model for the display. This helps with orientation and visual presentation,
but does slow down the frame rate for the display model.
Models are extracted from
Search and Rescue
with permission.
As a compile time option, you can select an
HH60
or
HH65
model for the display. This helps with orientation and visual presentation,
but does slow down the frame rate for the display model.
Models are extracted from
Search and Rescue
with permission.
The roadmap:
-
![[ Joystick image ]](images/wingman.small.png) The first step is to get the software working with a joystick and
manual control. Most of the code is already there, although it needed
to be ported from Aaron's Windows version to use the Linux joystick
interface.
The first step is to get the software working with a joystick and
manual control. Most of the code is already there, although it needed
to be ported from Aaron's Windows version to use the Linux joystick
interface.
This code is in place in heli-stick.c, although it is not very polished at this time. It requires that the limits on each axis be set in the limits[] array. The included calibrate program prints out this array for it. This was based on the earlier joystick parsing code in the efis package: test-joystick.c and Joystick.pm.
All three axes are debugged and working now. You can fly the helicopter around with the joystick and generally have fun. If you crash, the aircraft rights itself and gives you another chance.
-
The second step is to extract the IMU-related data from the simulator
model and feed it to our control code. We can begin giving different
flight controls to the software as we develop the different axes.
Rather than require a human pilot to operate the remaining controls,
it is possible to "lock" them in place and have the model ignore
those axes.
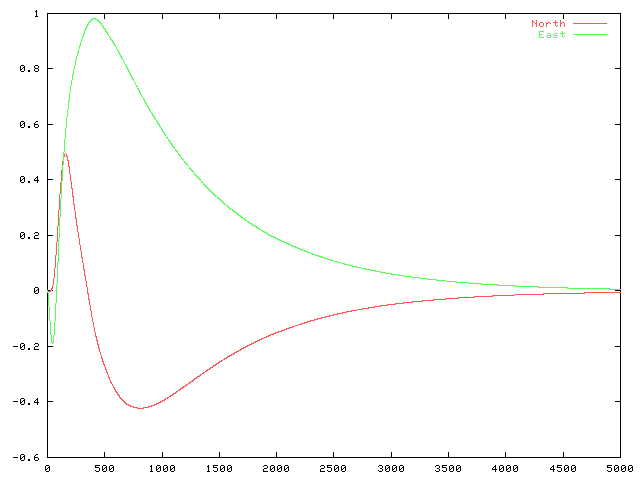
The hover.c program can now handle all three axes and six degrees of freedom. It will position the helicopter at (0,0) and 2m off the ground, then hold it there. The internal algorithm is a PD loop for pitch and roll attitude, with a PID loop for position control. You can watch an MPEG of it hovering (266 kb). You can also view a graph of the North/East parameters and a graph of the flight path.
After getting the PID constants tuned, noise will be introduced into the "sensor" data. The Kalman filter should be able to cope with this. It will better model the data produced by the actual IMU.
-
![[ Simulated hovering ]](images/sim.03.small.png) The third step will be to feed the simulated IMU data to the AVR in
real time and have our control board run the software. This will
help us determine if the 4 Mhz microcontroller is fast enough at
doing the Kalman filtering to safely fly the helicopter.
The third step will be to feed the simulated IMU data to the AVR in
real time and have our control board run the software. This will
help us determine if the 4 Mhz microcontroller is fast enough at
doing the Kalman filtering to safely fly the helicopter.
- And the fourth step is to actually put the system onto the helicopter. We should be flying by then...
![[ Simulated hovering ]](images/sim.03.png)
{kind=link}
{kind=link}